
After many experiments, it was 3D printed a support using Tinkercad.
A base holding a box where the servomotor fit in, a hole for the iris, some hooks for the wire and rubber band and a support for the light sensor.
 |
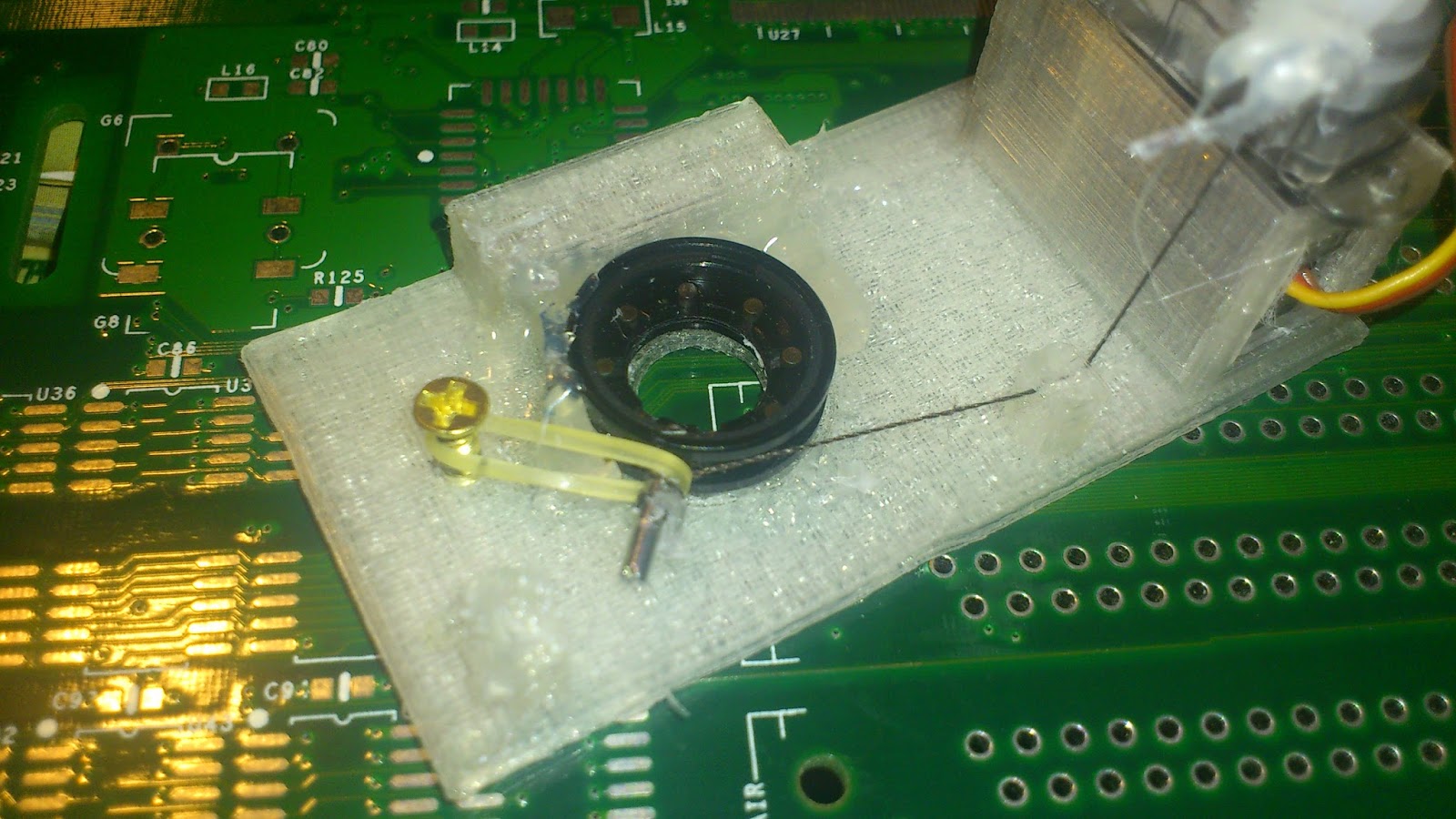
| First prototype of the mechanical iris |
Then during some experiments, it was found beneficial to attach the rubber band directly to the iris shaft rather that the wire.
The wire (sawing thread or fishing thread) is attached to the shaft and the servomotor.

The picture above shows the first prototype. The piece of rubber band is glued (hot glue) to the iris shaft directly to one side and to the post to the other one.
Since the rubber band can be easily broken, the idea is to use small rubber bands like the ones used for the braces (dentist).
A new post more angled will be used in order to keep the rubber band on the shaft without the need to glue to it.

Here an experiment using a braces rubber band.

With the third prototype things started to be more delineated.
The servomotor was placed vertical so to have less friction on the wire.
Also the support for the rubber band was redesigned.

This is the last prototype built.
No comments:
Post a Comment