
In order to diagnose/repair a Roomba, it is necessary to do some test and measurements.
Even if each Roomba has a diagnostic program on-board, often is necessary to have more control and a better feedback, with also some measurements.
To do so the basic tool every Roomba-hacker needs to have is a cable to connect the Roomba with a PC.
To do so the basic tool every Roomba-hacker needs to have is a cable to connect the Roomba with a PC.
There are many ways to buy/build such cable.
This article describe how I did it, just to give ideas. Is not necessarily the best way but it worked for me.
Material
We started from a consumer SIM USB card reader. These readers are available on ebay and similar places for few dollars.
Here a picture of the electronic board (they usually come in some kind of plastic box).
This article describe how I did it, just to give ideas. Is not necessarily the best way but it worked for me.
Material
We started from a consumer SIM USB card reader. These readers are available on ebay and similar places for few dollars.
Here a picture of the electronic board (they usually come in some kind of plastic box).

These USB SIM card readers usually are based on a chip capable to convert the USB port into a serial one, the Prolific PL-2303.
Then a cable with a minidin connector is needed and eventually a PCB minidin.
In my specific case I used :
Then a cable with a minidin connector is needed and eventually a PCB minidin.
In my specific case I used :
- USB SIM card reader
- 8 pin minidin PCB outlet
- 8 pin minidin cable (at both ends)
Preparation
The first thing to do is to remove from the USB SIM card some useless components, like the SIM card connector, a 74HC04 and a Crystal (3.5 Mhz).

At this point is necessary to identify on the PL-2303 the pins we need to connect.
- Pin 1 PL-2303
TXD -> connected to the Roomba RXD (pin 3 minidin) - Pin 3 PL-2303
RTS -> connected via a transistor to the Roomba Power pin (pin 6 minidin 7 - pin 5 minidin 8) - Pin 5 PL-2303
RXD -> connected to the Roomba TXD (pin 5 minidin 8 - pin 4 minidin 8) - Pin 7 PL-2303
GND - pin 6/7 minidin 7 - pin 7/8 minidin 8)
Here the schematic of what we want to do :
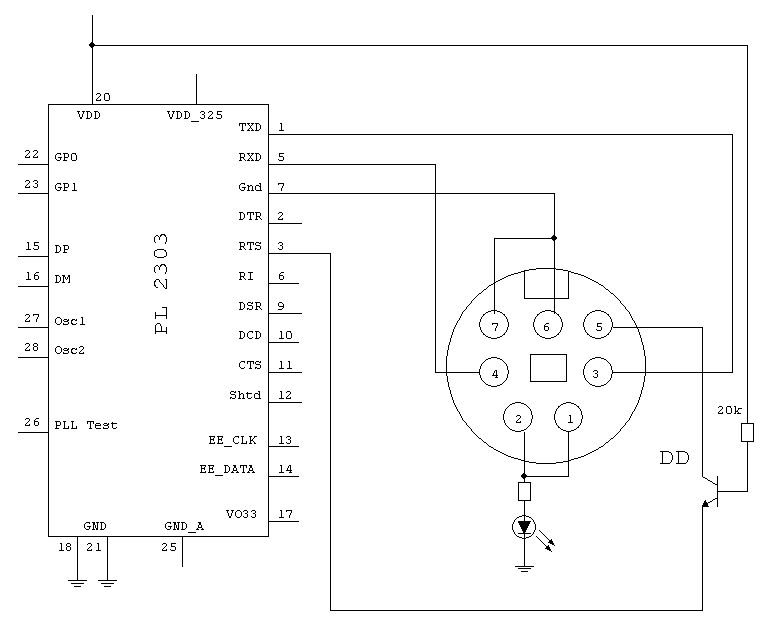
It is very important to pay attention of the type of minidin used.In the schematic I used the original Roomba minidin 7, so the pinout is DIFFERENT from the minidin 8 !
On the net is possible to find information about the pinout and specifications, like here.
Here some pictures of cable preparation.











Hi,
ReplyDeleteI've tried this hack with a Nokica ca-42 cable that have the PL2303, so it does the USB-serial conversion.
I've just connected the GND, TX and RX, but when connected to the PC and Roomba 530 (turned on), the RoombaComm says that Roomba is not detected.
So, the problem could bae that the DD singnal is not connected?
If, so, wich transistor do I have to put between RTS and Roomba power signal?
Thanks a lot.
Yes, the DD signal must be present.
ReplyDeleteFor the transistor any NPN switching would do. I used a 2n4400.
Has anybody got this to work. I made it up as described but windows device manager is not even recognising that a prolific device has been plugged in now.
ReplyDeleteI had this working nicely but of course I didn't use Windows. Since the interface is based on a standard USB<->RS232 chip is possible that maybe you damaged the board during the modification. Even Windows should recognize the interface.
DeleteUsed the same schematic to modify Trendnet TU-S9 USB to serial converter. I desoldered the MAX213 chip (ADM213, SIPEX SP213EEA or similar). I used minidin 7. Works.
ReplyDelete